 Scholar
Scholar
 Main
Main
 Linkedin
Linkedin
 HCRL
HCRL

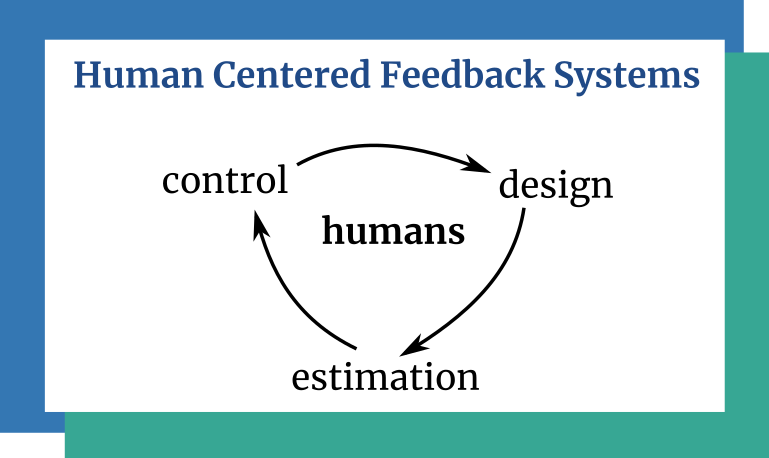

What is Direct Control of Physically Interactive Robots?
Research Projects


![]()
![]()
![]()
![]()
![]()
![]()
![]()
Research Investigator at the University of Michigan in direct human control of physically interactive robots.
![]()
![]()
![]()
![]()
![]()
![]()
![]()